
👋 My name is Scott (Seongwon) Lee

I am currently a Ph.D. Resident at X, the Moonshot Factory (formerly Google X), where I am contributing to a stealth project on automating wet labs using robotics and multi-agent LLMs.
I am a Ph.D. student in Mechanical Science and Engineering Department at the University of Illinois at Urbana-Champaign, advised by Professor Nancy M. Amato.
My research focuses on developing fast and scalable multi-robot task and motion planning algorithms, drawing on extensive experience in integrating hardware and software for impactful real-world deployments.
I received my bachelor’s degree in Mechanical Engineering under the guidance of Professor Jongeun Choi from Yonsei University in Seoul, South Korea, in 2021.
Research
Lazy-DaSH: Lazy Approach of Hypergraph-based Multi-robot Task and Motion Planning
Seongwon Lee, James Motes, Isaac Ngui, Marco Morales, Nancy M. Amato
Under Review / Paper / Poster / Simulation / Hardware Exp.
Seongwon Lee, James Motes, Isaac Ngui, Marco Morales, Nancy M. Amato
Under Review / Paper / Poster / Simulation / Hardware Exp.
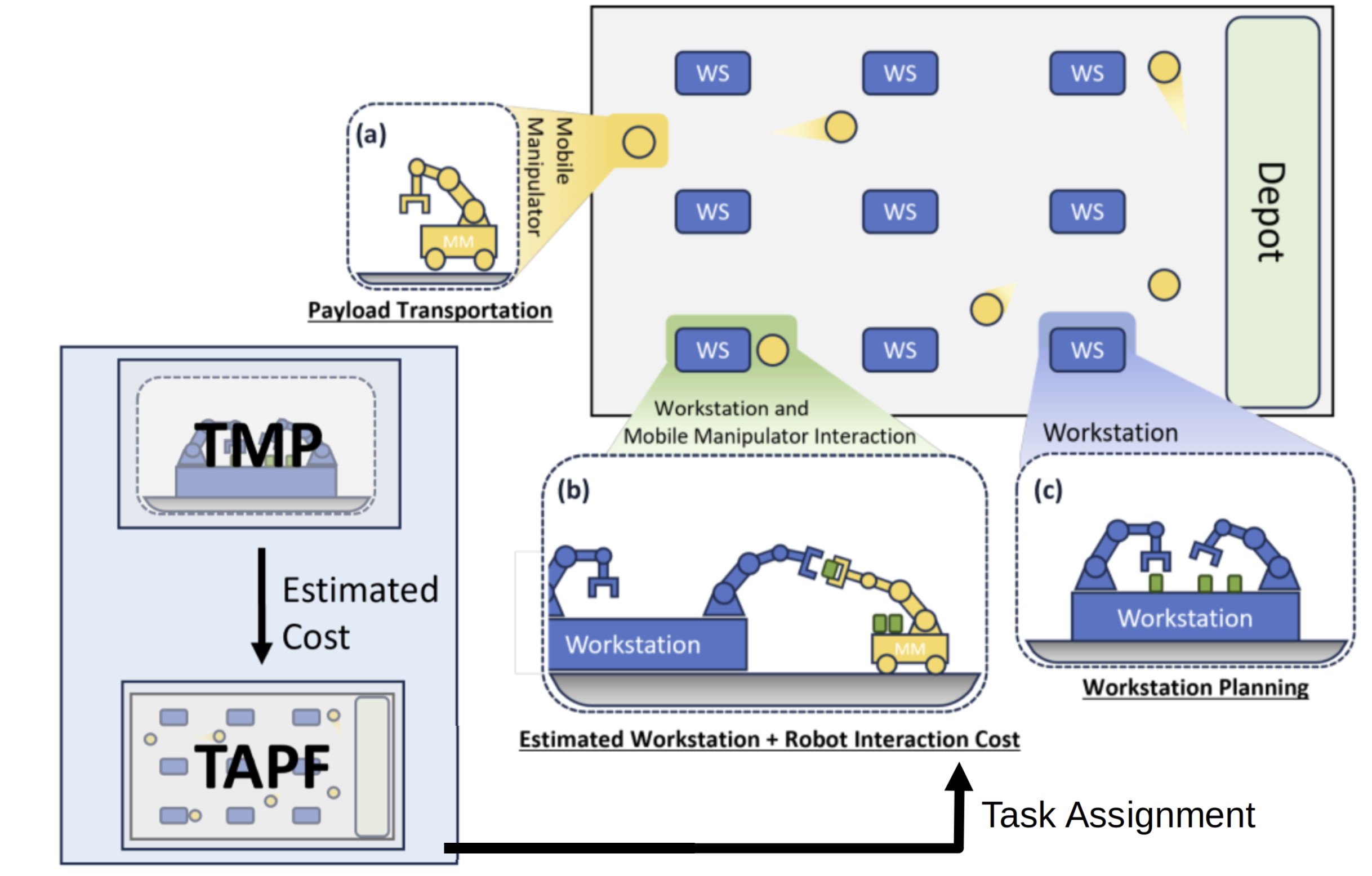
A Hierarchical Approach to Workstation-based Task Allocation and Motion Planning
Seongwon Lee, James Motes, Isaac Ngui, Marco Morales, Nancy M. Amato
IROS 2023 Workshop / Paper / Poster
Seongwon Lee, James Motes, Isaac Ngui, Marco Morales, Nancy M. Amato
IROS 2023 Workshop / Paper / Poster
Output Feedback Control Design for Quadrotors Using Recursive Least Square Dynamic Inversion
Seongwon Lee, Joohwan Seo, Connor J. Boss, Joonho Lee, Jongeun Choi
Elsevier Mechatronics / Paper / YouTube
Seongwon Lee, Joohwan Seo, Connor J. Boss, Joonho Lee, Jongeun Choi
Elsevier Mechatronics / Paper / YouTube
Nonaffine Helicopter Control Design and Implementation Based on a Robust Explicit Nonlinear Model Predictive Control
Joohwan Seo, Seongwon Lee, Joonho Lee, Jongeun Choi
IEEE Transactions on Control Systems Technology / Paper / YouTube
Joohwan Seo, Seongwon Lee, Joonho Lee, Jongeun Choi
IEEE Transactions on Control Systems Technology / Paper / YouTube
Unexpected Collision Avoidance Driving Strategy Using Deep Reinforcement Learning
Myunhoe Kim, Seongwon Lee, Jaehyun Lim, Jongeun Choi, Seong Gu Kang
IEEE Access / Paper
Myunhoe Kim, Seongwon Lee, Jaehyun Lim, Jongeun Choi, Seong Gu Kang
IEEE Access / Paper
Projects
Mind in Vitro (MiV)
Developing an robotics automation system for a biology lab, funded by National Science Foundation (NSF)
Developing an robotics automation system for a biology lab, funded by National Science Foundation (NSF)
Skills: 


MiV
Factory Automation Demo
Demonstrated a simple factory automation demo to pre-college students at the Engineering Open House (EOH) at UIUC
Demonstrated a simple factory automation demo to pre-college students at the Engineering Open House (EOH) at UIUC
Skills: 


EOH
Robotics Course Project: Handoff Operation for Mobile Manipulators
Designed a vision-based system for handoff operations between a workstation and a mobile manipulator
Designed a vision-based system for handoff operations between a workstation and a mobile manipulator
Skills: 
Youtube
Robomaster AI Challenge ICRA2019
Implemented cooperative planning algorithms for fully autonomous combat robots (Achieved 3rd place)
Implemented cooperative planning algorithms for fully autonomous combat robots (Achieved 3rd place)
Skills:
Robomaster AI Challenge / Youtube
Professional Service
- Reviewer
- RAL, ICRA, IROS, WAFR (2022 - 2024)
- Teaching & Mentoring
- Research Program Mentor (CS), UIUC – Fall 2023, Summer 2024, Spring 2024
- Fluid Mechanics (ME 310), UIUC – Fall 2022, Spring 2024, Fall 2024
- Mathematical Methods (TAM 541), UIUC – Fall 2021